
Movements pattern of axis
The different kinematics of industrial robots are always based on the following three axis respectively joints:
| Figure | Name and symbol | Remark |
|---|---|---|
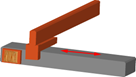 |  Symbol prsimatic axis | Linear joint (L) - L-axis can be positioned precisely - mechanical solid - low agility - if its movement is orthogonal, it can be defined as orthogonal (type O) |
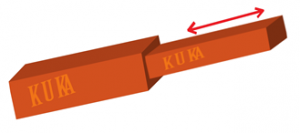 Prismatic or sliding joint (P) | ||
| pics is coming soon | pic is coming soon | Rotational joint (type R)- fast moments are possible - mechanical weak compared to L-axis |
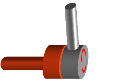 rotary joint | Revolving joint (type V) | |
R-Axis | Twisting joint (type T) | |
 | Spherical or ball joint (S) for IR (still) not matter |
|
 Kinematics - Linked joints | Linked joints No standard symbol exists. | - Precision can be reduced due to the tolerance of each joint - Possibility to move is reduced by additional levers |
Main- and hand-axis
... using the example of the universal robot
The axis 1,2 and 3 represent the main axis of the robot. By means of these axis it is possible for the robot to reach each point within the workspace. The tool itself can be orientated by the axis 4,5 and 6 - also called auxiliary- or hand-axis.
The number of the axis stands for the order the axis are mounted.
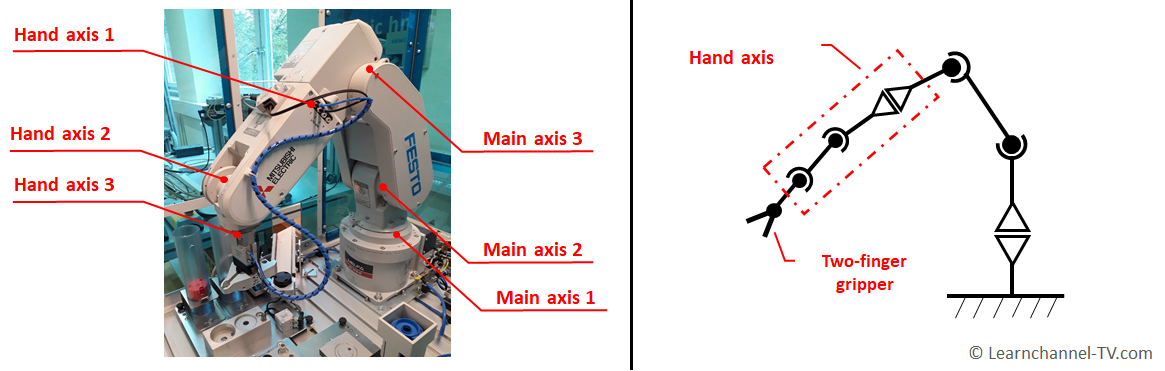
Robot main and hand axis with symbols
