
Robot Tool-coordinates
robot-tool-coordinates
Tool-coordinates include data of the tool, such as:
- where is the TCP(tool center point)
- the geometry of the tool (the orientation of the tool)
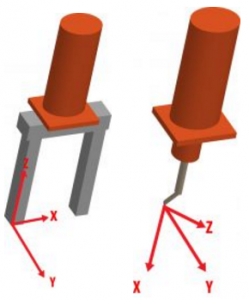
Gripper coordinates describe the orientation and position of the effector in space. The zero point of the coordinate systems is located at the Tool-Center-Point (TCP) of the effector. Usually the coordinates are stated Cartesian, whereas one of the axes have to point into the extended direction of the gripper.
Which advantages you have by using tool-coordinate-system? By using the tool coordinate system, many applications are easier to program for the user. Examples from the practice in which the tool measurement is used:
Robot-Tool-coordinates
Fig.1: To rotate the tool round the TCP or move in a predetermined angle along the path while keeping the orientation constant.
Gluing: adhesive must be applied along the edge in a constant angle.

Robot Tool-Coordinates
Fig .2: The workpiece must be inserted into the holder in a precisely fitting manner. For this purpose, the geometry of the gripper must be known.
The following tasks are easier to program using the tool coordinate system:
- Turning the tool around the TCP (tool center point)
- To maintain the speed at the TCP even with ccomplex paths
- Topush the tool in a certain direction
