
Robot - WORLD-coordinate system
The WORLD-coordinate system is a cartesian coordinate system for describing the location of the points within the workspace. Here, a work point is specified in the form of coordinates: P(x, y, z)
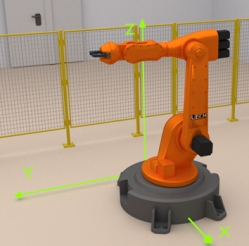
Robot world coordinate system
Advantage: Detailing the points in WORLD-coordinates is simple. Linear movements can be programmed easily.
Disadvantage: Ambiguity - that means that a certain position can be achieved with a plurality of axial positions. This is concerns especially jointed-arm robots.
Ambiguity of an articulated robot
The coordinate details also have transformed into joint coordinates. This implicates a high computational effort for controlling and a major programming effort for the producer control unit.
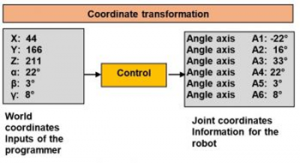
robot coordinate transformation

Thank you very much