
Coordenadas da junta do robô ou Espaço das Juntas
Coordenadas da junta do robô ou Espaço das Juntas
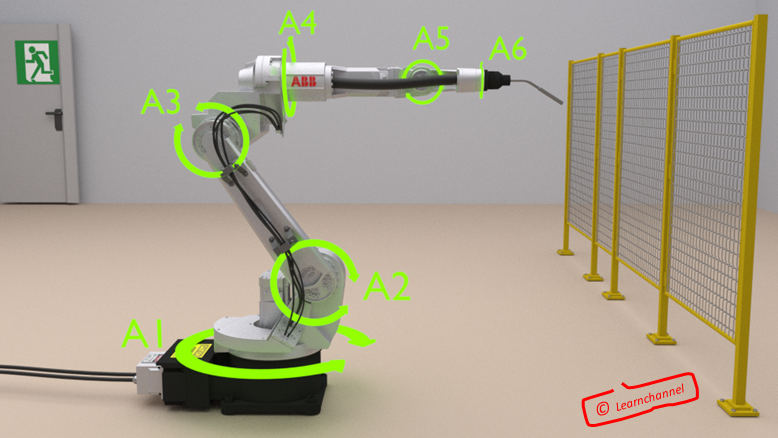
No sistema de coordenadas específicas do eixo ou sistema de coordenadas conjuntas, cada eixo do robô pode ser movido individualmente tanto na direção positiva quanto na negativa.
Um ponto de trabalho é definido pela especificação do ângulo: P (ângulo A1, ângulo A2, ...,ângulo A6)
Vantagens:
- nenhuma ambiguidade possível
- Não é necessária a transformação de coordenadas, ou seja mudar entre o espaço cartesiano e espaço das juntas.
