
Robot JOINT-coordinates
The angle-position and length of each axis of an articulate robot axes describe the orientation of the TCP exactly. With the joint coordinate-system each robot axis can be moved particularly in positive or negative sense rotation.
Coordinates: P (angle A1, angle A2, ... , angle A6)
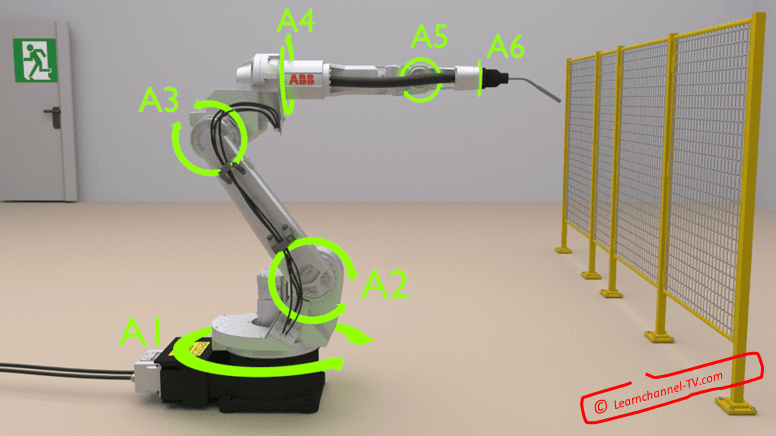
fig.: Robot joint coordinates - Learnchannel
Advantage:
- ambiguity can be avoided
- no transformation of coordinates necessary
