
Coordinates of a robot system
For the programmer, various robot coordinate systems are available, which can be used to determine for example the position and orientation of the TCP much easier, to get the geometry of a workpiece, etc.
Robotics - coordinate systems
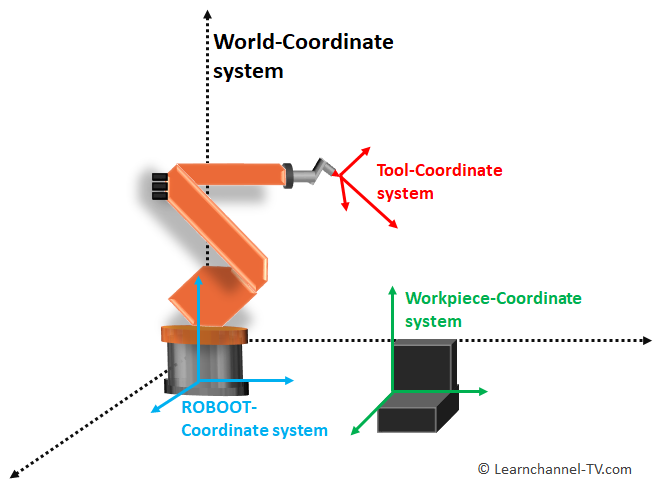
Robotic systems are generally defined as Cartesian coordinate systems:
- Robot World Coordinate System
- Robot origin coordinate system or ROBROOT coordinate system
- Workpiece and / or BASE coordinate system
- Robot Tool coordinate system
The ROBOOT-Koordinatensystem is a cartesian coordinate system, which has its origin at the footprint of a robot. It describes the position of the robot regarding the World-coordintes.
It is useful to set the origin of the ROBOOT coordinate system with the origin of the WORLD coordinate system. See the figure above .
