
Kinematics hand axis and orientation TCP
| To get the robot hand in the desired angle, you would need 3 handaxis. | 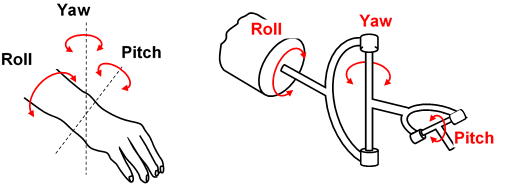 robot orientation hand axis |
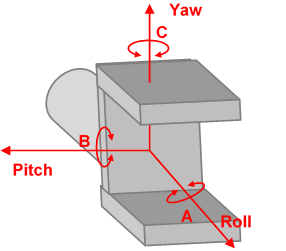
fig.: orientation robot gripper
The angle of the robot hand is called orientation. The axes of the hand, designated A, B and C, allow three movements: Roll, Pitch and Yaw. These terms were derived from shipping and aviation.
The angle position of the robot hand is called "orientation".
TCP = engl. Tool Center Point
- Roll Δ Rollen, Drehen
- Pitch Δ Nicken
- Yaw Δ Gieren
TCP = engl. Tool Center Point (zu Deutsch: Werkzeugspitze)
