Coordinate transformation
For the control of a robot, the position of the tool is usually specified by the programmer in Cartesian coordinates. In order to control the drives, these data must be converted into joint coordinates. The following figure illustrates this as well as the terms in this context:
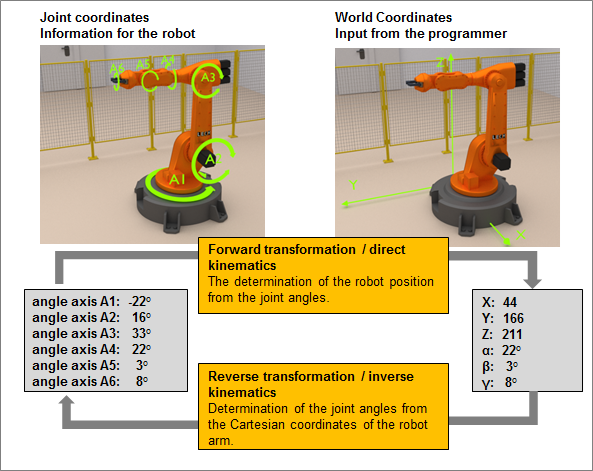
robot cordinate transformation
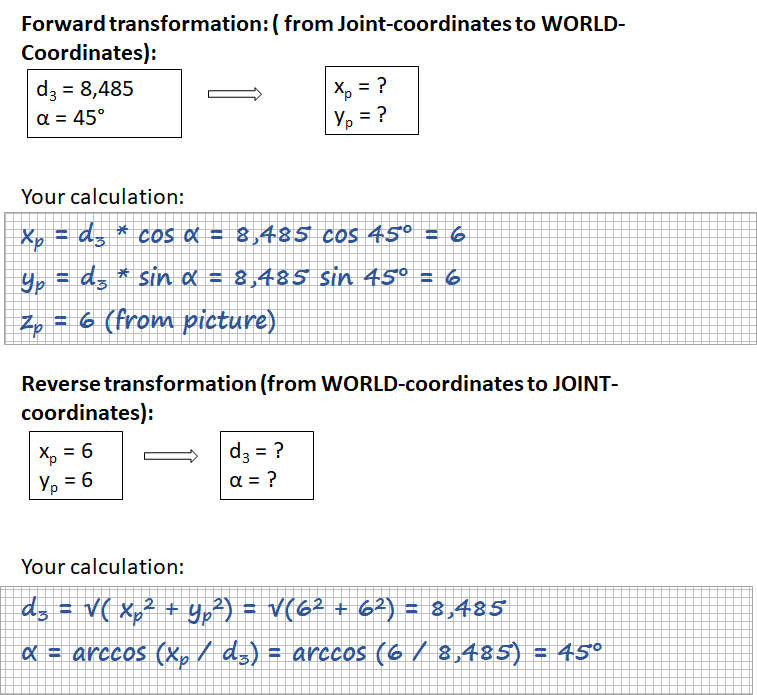
Work order: Coordinate transformation with conventional geometry

robot coordinates work order
Given is the RLL robot within the cylinder coordinate system. Transform with these details the position of the TCP witihin the cartesian coordinate system!