
Work order: Parameterize the frequency inverter
auxiliary aid: Technical Data Manual
Work Order VFD
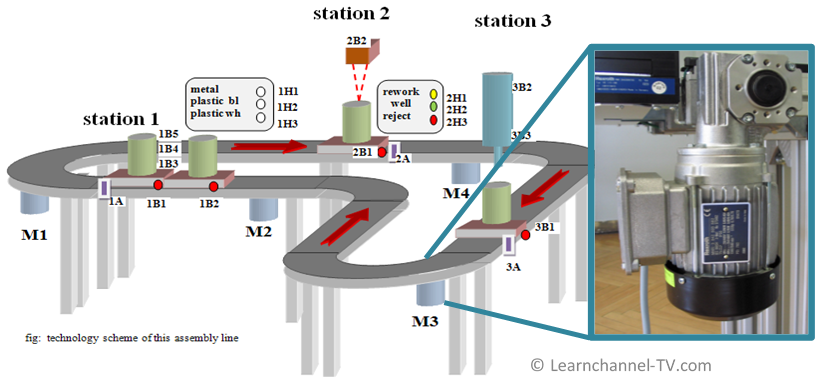
In order to enable a smooth start and stop, the drive for the conveyor belt is controlled by a VFD. Your work order is to understand the information of the motor rating plate and to determine the correct parameters for the VFD.
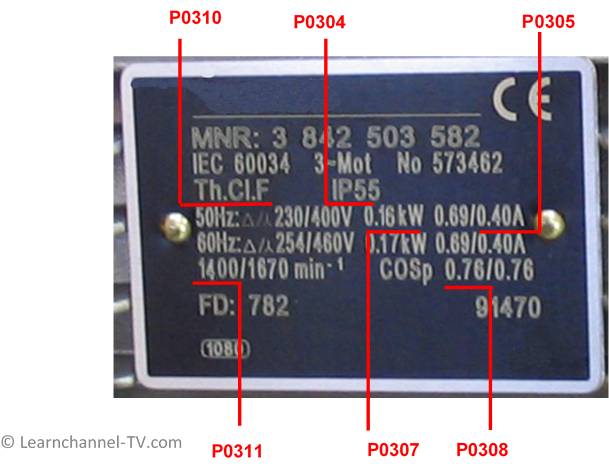
Motor rating plate of a 3 Phase Induction motor
A1: Explain the information given on the rating plate.
A2: How should the motor be switched on our three-phase network 400 V / 230 V if you would connect it directly (Star or Delta)? Please give a short explanation!
A3: Determine slip, slip speed and efficiency for nominal operation and operating frequency f = 50 Hz.
A4: So that the belt starts and stops smoothly, choose a frequency converter. According to the manufacturer, the following motor parameters must be entered for initial commissioning:
P0304: nominal voltage
P0305: nominal current
P0307: nominal power
P0308: nominal power factor
P0310: nominal frequency
P0311: nominal speed
Enter the specific values. Missing values you have to calculate.
A5: The workpiece carriers (workpiece carriers) should be conveyed at a maximum speed of 0.4 m/s. For starting the acceleration for the belt should be 0.10 m/s2. When stopping, the deceleration should be 0.25 m/s2. To which values do you have to set the VFD parameters P0320 (ramp-up time) and P0321 (ramp-down time)?
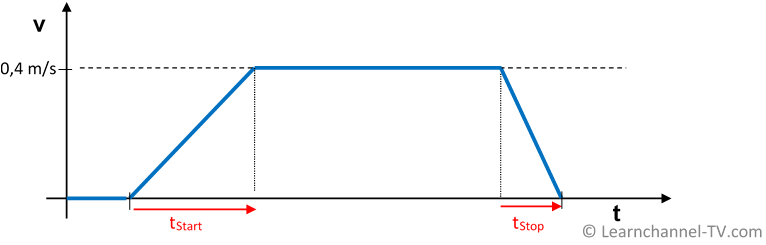
Determination of start-stop time for belt drive
