Motor Control with a VFD or Variable frequency drive
This video describes the functioning of VFD or variable frequency drive. Other names for this are frequency converter, AC drive converter, etc. From the content:
Block diagramm of its main componentes and their function
Building the output signal by Pulse Width Modulation PWM
Building a 3 phase signal
Controlling torque and speed
Parameter Boost and ramp
Technical implementation of the DC/AC converter
The frequency converter allows both synchronous and asynchronous motors to be controlled steplessly in speed and torque.
The operating principle of the frequency converter is simple: First the AC voltage of the local power supply has to be rectified, This is followed by a smoothing of the pulsating DC voltage. After this you can convert this DC voltage into an AC of desired frequency and level:
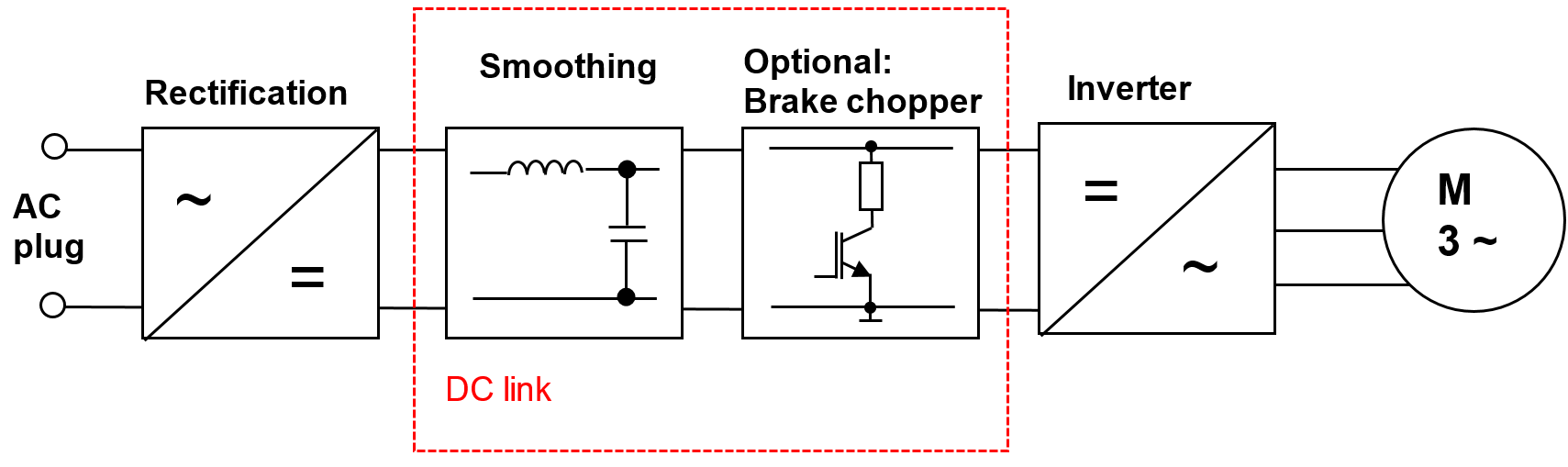
Structure of a VFD
Rectifier
Smaller frequency converters for less power can also be powered by a single-phase AC voltage. It is rectified by a bridge circuit. If the braking energy of the motor should be fed back into the power supply (keyword: regenerative braking), a fully controlled bridge rectifier B6C is used here.
Smoothing
The pulsating DC voltage is smoothed within the DC link by a buffer capacitor, also an inductance coil throttles strong current fluctuations.
Brake chopper
This module is optional and serves to dissipate the braking energy of the connected motor via a resistor.
Inverter
Furthermore, the already smoothed voltage from the DC link is converted into a three-phase voltage by an DC/AC inverter. More and more IGBTs are used for this function today.
INSTRUCTIONS FOR MAINTENANCE AND SERVICE
Due to the capacitors within the DC Link you still have high voltage after switching off the VFD. Qualified personnel must wait at least ten minutes before opening this device and check that the VFD is discharged.
Parameterization VFD
V/f control (vector control)
V/f control is the simplest method to control of a 3 phase asynchronous machine and is applied for drives with few dynamic drive requirements (such as belt drives, pumps, fans).
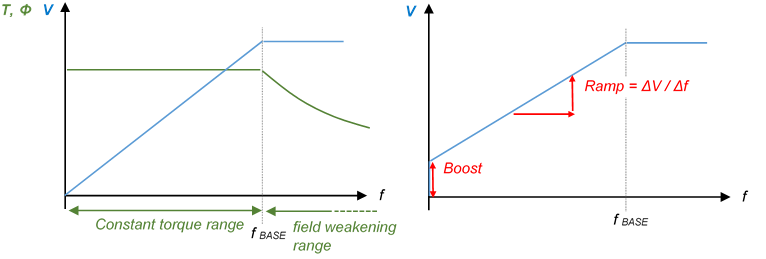
The purpose is to keep the engine torque constant. This is achieved with the parameter called "Ramp": With increasing frequency, the impedance of the motor winding also increases. As a result, the motor current would decrease and thus also the magnetic flux Φ leading to less torque. To counteract this, the stator voltage is increased in proportion to the frequency.
The parameter "Boost" is to compensate the ohmic resistance of the motor winding especially at low frequencies, as well as to overcome the static friction:
Parameter VFD
87-Hz-operation with VFD:
To get higher speeds with constant torque the 87 Hz characteristic can be used. Smaller motors up to approx. 3 kW are usually switched to star on a 400 V supply voltage. The field weakening range starts at 50 Hz and the motor torque drops. If these motors are now connected to delta, the base frequency can be set to 87 Hz. Thereby the motor torque can be kept constant up to 87 Hz.
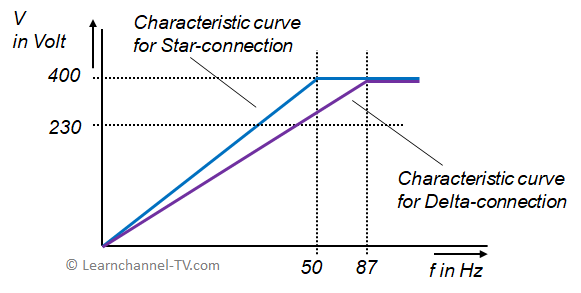
fig.: VFD operating in 87-Hz
What you can see: The characteristic curve for delta connection thus is flatter and reaches the maximum output voltage of 400 V of the inverter at 87 Hz. With this trick you can increase the output power, since the motor still delivers its rated torque at 87 Hz. However, the windings of the motor are under greater strain concerning insulation and the motor heats up more.
