
Overview Controlled Systems
Descripe and classify controlled systems
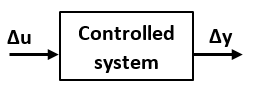
In order to check and classify the behavior of the controlled systems, the input signal is preferably a voltage change from 0V to 1V. The step response can be used to determine parameters of the controlled system:
Evaluate step response of controlled system
Proportional Controlled systems
Controlled systems with proportional behavior or P-systems have an end value or steady state value and are therefore also referred to as controlled systems. They can be further distinguished in P- systems with and without delay time and dead time:
PT0-system
A controlled system without delay exists when the controlled variable follows the manipulated variable without a measurable time delay and thus suddenly reaches its steady state. In practice, there is practically no pure P-system. Even a transistor has a delay. However, for simplicity, if the time delay is very small or barely measurable, then the reaction can be idealized.
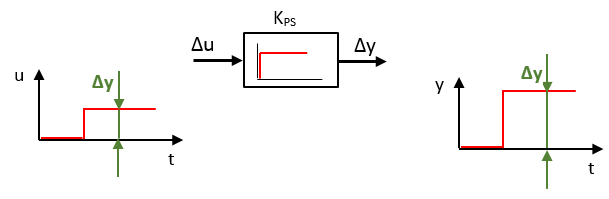
Step response and symbol PT0-system
Parameter to describe this system: Transfer coefficient Kps also referred as gain: KPS = Δx/Δy
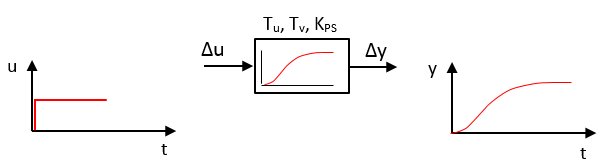
P-T1-element (1st order system)
The behavior of a single storage element system (1st order system) can be described by an exponential function:
P-T1-plant (1st order system)
Parameter: Transfer coefficient Ks , Time constant T
The e-function is described by: x = Ks * y * (1 – e –t/T)
The time constant T is a measure for how fast the steady-state condition can be reached. Graphically it can be determined using the slope tangent at the starting point. This tangent cuts the straight line of the maximum value. Now draw a straight line vertically to the time axis.
The time constant is the time that the controlled value x needs to reach 63,2% of the final value (maximum, steady-state). Practically, the steady-state is reached after about 5T.
Multiple storage element ( P-Tn)
step response and symbol of PTn system
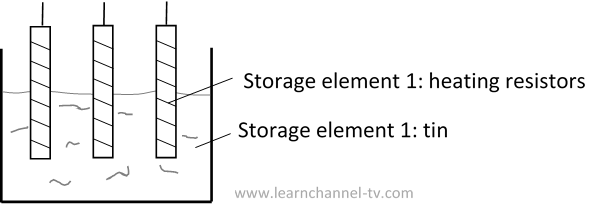
If a controlled system has several stages which store energy, then you call it a PTn - system. Here you see an example: A tin bath (PT2-system) consisiting of 2 separate elements: the heating resistors and the tin itself - both elements store energy in form of heat.
Closed-loop control - Multiple storage element ( P-Tn)
How to determine the parameter via the step-response you see here:
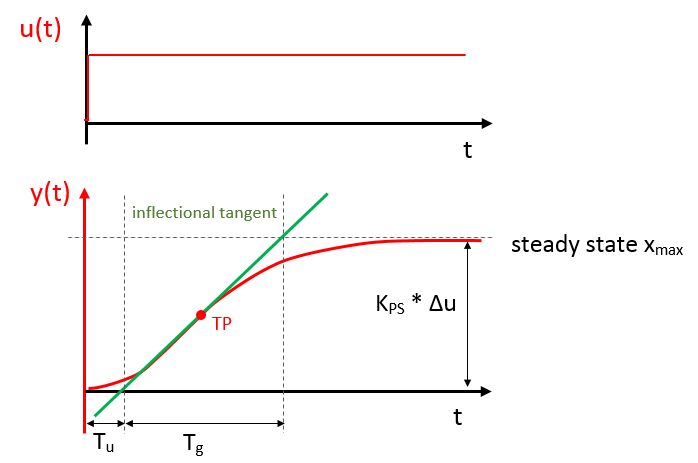
Step response of PTn-system
Parameter: Tg balancing time, Tu delay time
