
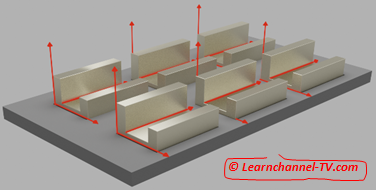
fig.: Robotics - Workpiece Coordinate System
The workpiece-coordinate-system is a Cartesian coordinate-system whose origin is within the work piece or at a corner of the workpiece.
Advantages of measuring the base :
- Thereby you can determine a specific point on the pallet, the clamping table or the workpiece. To these points all future teach-points can refer to. In the program mode, you now have the option to move the base or to rotate it. Automatically all operation points will be adapted.
- If there are several workpieces on the pallet, it is sufficient to know the workpiece geometry of one workpiece. Only the zero point of a new pallet has to determined.
