
Movement pattern (Interpolation teqnics)
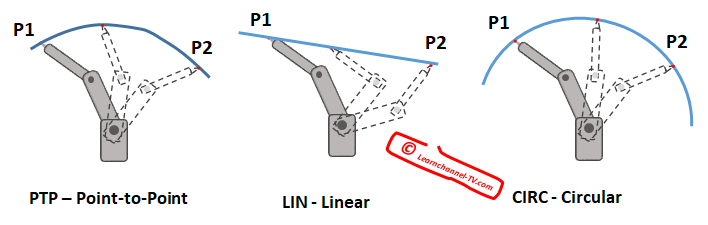
Fig.: Robot interpolation - PTP - LIN - CIRC
PTP: The TCP is moving the fastest way to the target position.
LIN: The TCP moves within a straight line to the desired position.
CIRC: The TCP moves within a circular path.
The fastest movement pattern is the so called ´PTP´. But for accurate moving PTP is not applicable because no straight line is driven. The movement pattern ´Synchro PTP´ harmonizes the speed of the fast moving axis to the speed of the low moving axis. The movement patterns `LIN´ and ´CIRC ´require high computing power, because all drives of the axis have to be coordinated to each other.
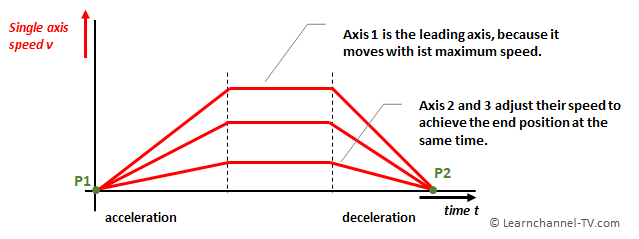
fig.: Robotics - moving in Synchro PtP
Moving to reference position with tolerance- Why?
fig.: Tolerance of Position
In this picture as shown the point P2 is not hidden exactly but achieved within a permitted tolerance.
Advantage: The robot has not to be slowed down completely. That implies less attrition and short-time cycle time.
Exercise: Classify the following moving patterns as shown!
Robotics moving pattern
